销售服务热线:
销售服务热线:



支持脉冲、模拟量、IO触发、485协议等控制方式
IO控制提供16段可设定轨迹值,35种原点复位模式
控制模式支持位置、速度、转矩,并可在模式间进行切换
支持多种编码器,多种对数电机
| 参数 | LD5-400 | |
| 额定输出功率 | 400W | |
| 额定输出电流 | 10A | |
| 最大输出电流 | 35A | |
| 主电源 | 24~48V直流电源 | |
| 控制方式 | SVPWM正弦波控制 | |
| 输入脉冲 | 5-24V脉冲兼容,500kHz | |
| 调速比 | 3000:1 | |
| 电子齿轮比 | 1~32767/1~32767 | |
| 模拟输入 | -10~10Vdc,输入阻抗20kΩ,非隔离 | |
| 输入信号 | 5路数字量输入,并且支持输入功能自定义,伺服使能、正向限位、反向限位、警报清除、增益切换输入、偏差计数器清除输入、指令脉冲禁止输入、指令分频倍频切换输入 1、指令分频倍频切换输入 2、内部指令速度选择 1 输入、内部指令速度选择 2 输入、内部指令速度选择 3 输入、零速箝位、速度指令符号输入、转矩指令符号输入、紧急停止。(具体自定义请参考LD5-400使用说明书参数Pr4.00-4.04的设置) | |
| 输出信号 | 4路数字量输出,并且支持输出功能自定义,报警输出、伺服准备输出、外部制动器解除信号、定位完成、速度到达输出、零速箝位检测输出、速度一致输出、位置指令有无输出、速度指令有无输出。(具体自定义请参考LD5-400使用说明书参数Pr4.10-4.13的设置) | |
| 编码器信号输出 | A相、B相、Z相,长线驱动方式输出 | |
| 报警功能 | 与FPGA通讯错误、电流检测回路错误、模拟量输入回路错误、直流母线回路错误、温度检测回路错误、控制电源电压过低、直流母线电压过高、直流母线电压过低、过电流、智能功率模块(IPM)过流、驱动器过热、电机过载、电阻泄放回路过载、编码器断线、编码器初始化位置错误、编码器数据出错、位置误差过大错误、速度误差过大错误、超速、I/F输入端口分配错误、I/F输入端口功能设定错误、I/F输出端口功能设定错误、EEPROM参数保存时CRC校验错误、正/负超程输入有效、强制报警输入有效。 | |
| 操作与显示 | 5个按键,可进行点动、梯形波测试,还可进行各环参数和输入输出信号有效电平的修改和保存;6位LED,可显示转速、电流、位置误差、驱动器型号版本及其地址ID值等 | |
| 调试软件 | 通过ACHSeries可以调节电流环、位置环、速度环的各个参数,更改输入输出信号有效电平和电机参数,并可以文件形式进行参数的导入导出,方便驱动器和不同电机或不同负载的匹配;监视在梯形波测试运行下速度、位置误差等波形。 | |
| 通讯接口 | RS-232,1:1通讯;RS-485,0:N(0≤N≤127),Modbus协议 | |
| 适用负载惯量 | 小于电机惯量的20倍 | |
| 重量 | 0.5Kg | |
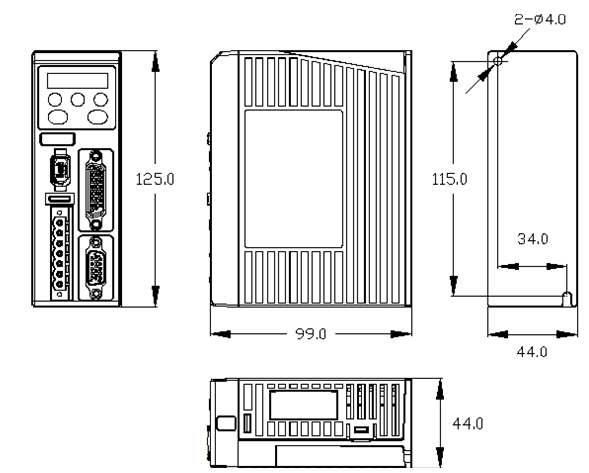
| 尺寸 | 125*99*44mm | |
| 使用环境 | 场合 | 室内(避免阳光直射),不能放在其它发热的设备旁,要避免粉尘、油雾、腐蚀性气体和湿度太大及强振动场所,禁止有可燃气体和导电灰尘; |
| 使用温度 | 0℃~+45℃(若温度超过40℃,请加强周边空气循环) | |
| 保存温度 | -20℃~+65℃ | |
| 湿度 | 40—90%RH,不结露 | |
| 振动 | 5.9m/s2MAX | |
| 安装 | 垂直安装 | |